
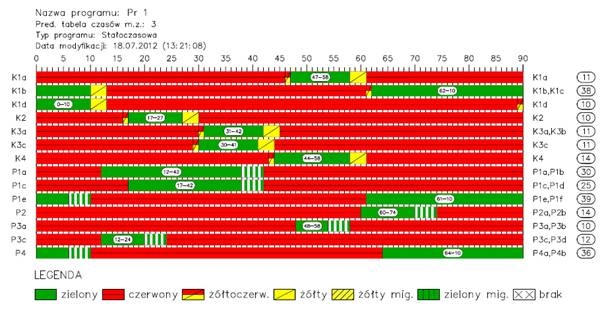
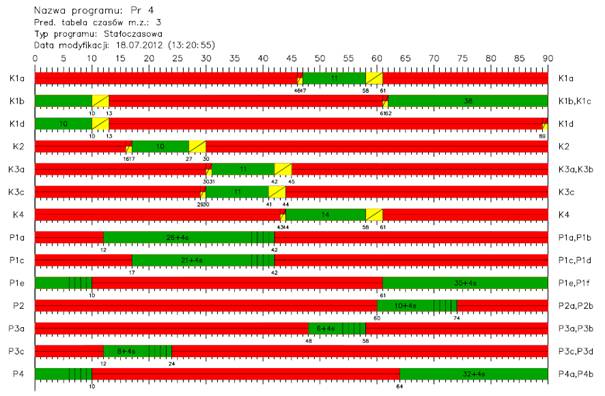
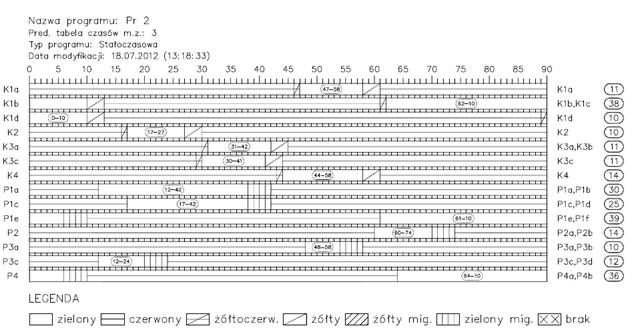
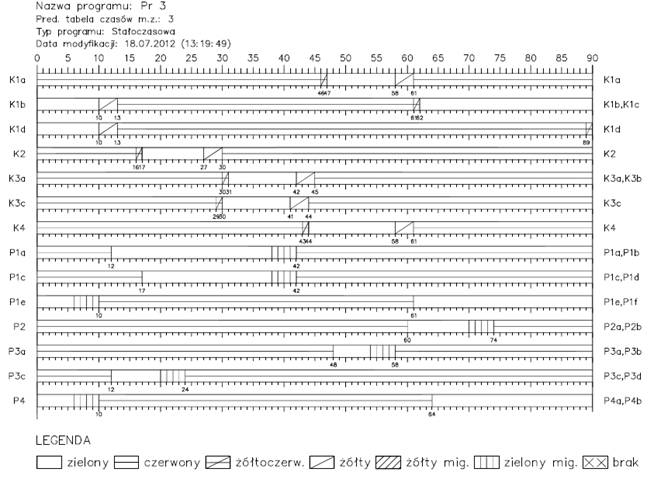
Przykłady programów sygnalizacji w wersji kolorowej i czarno-białej z programu GA Sygnalizacja
Rys 1. Program kolorowy – styl kolorowy 1
Rys 2. Program kolorowy – styl kolorowy 2
Rys 3. Program czarno-biały – styl czarno-biały 1
Rys 4. Program czarno-biały – styl czarno-biały 2
Rys 5. Program czarno-biały – styl czarno-biały 3
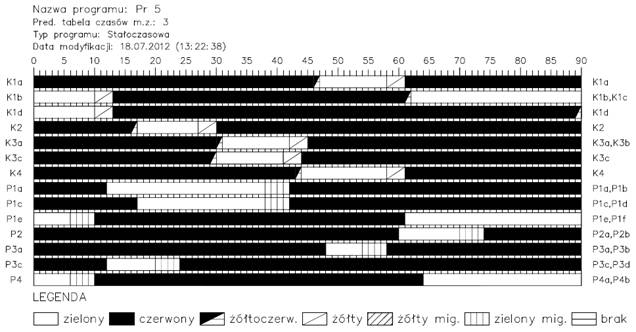
W celu usprawnienia i łatwości odczytania sygnalizacji w programie sygnalizacji stosuje się symbole odpowiadające danym sygnałom.
| Symbol | Znaczenie symbolu |
 |
Sygnał czerwony |
 |
Sygnał czerwony migający |
 |
Sygnał czerwony z żółtym |
 |
Sygnał żółty |
 |
Sygnał żółty migający |
 |
sygnał zielony |
 |
sygnał zielony migający |
 |
brak sygnału |
Podstawowe definicje
- Strumień ruchu — zbiór uczestników ruchu tego samego rodzaju, którzy przekraczają obszar skrzyżowania w określonym kierunku pomiędzy punktami: początkowym i końcowym przemieszczenia.
- Punkt kolizji — punkt leżący w obszarze skrzyżowania, w którym następuje przecięcie lub połączenie torów jazdy co najmniej dwóch strumieni.
- Strumienie kolizyjne — para strumieni ruchu, których tory jazdy przecinają się.
- Grupa sygnalizacyjna — wybrany zestaw sygnalizatorów lub jeden sygnalizator nadający w każdej chwili sterowania jednakowe sygnały przeznaczone dla określonych strumieni ruchu.
- Czas międzyzielony — czas między chwilami zakończenia i rozpoczęcia sygnałów zielonych dla dwóch wzajemnie kolizyjnych strumieni ruchu, z których pierwszy jest strumieniem ewakuującym się, a drugi wjeżdżającym lub wkraczającym.
- Cykl sygnalizacji — minimalny powtarzalny uporządkowany zbiór sygnałów w programie sygnalizacji o określonej strukturze, zapewniający każdemu z uczestników ruchu co najmniej jednokrotne otrzymanie sygnału zielonego
- Faza ruchu – stan ruchu na skrzyżowaniu, w którym przynajmniej jeden z potoków ruchu pojazdów lub pieszych ma dozwolony przejazd albo przejście przez skrzyżowanie.
Przykład programu sygnalizacji z opisem części
Rys 6. Szczegółowa budowa programu sygnalizacji
Projektowanie programu sygnalizacji świetlnej
Sporządzenie programu obejmuje:
1. Zebranie danych wyjściowych i obliczenia przepustowości
2. Określenie liczby, konfiguracji i kolejności faz
3. Obliczenie czasów międzyzielonych dla pieszych i pojazdów
4. Wyznaczenie czasu trwania cyklu, faz i sygnałów
5. Kontrola przepustowości
6. Sprawdzenie miar efektywności faz.
Kryteria konstrukcji programu sygnalizacji świetlnej
- Zapewnienie wymaganej przepustowości,
- Minimalizacja strat czasu,
- Poprawa bezpieczeństwa.
Osiągnięcie w pełni tych wszystkich jest wręcz nie możliwe ponieważ wzajemnie się wykluczają tzn.:
Większe bezpieczeństwo → Większa liczba faz → Mniejsza przepustowość → Większe straty czasu
Lub
Mniejsza liczba faz → Mniejsze straty czasu → Mniejsze bezpieczeństwo → Średnia przepustowość
Rodzaje programów sygnalizacji
- SYGNALIZACJA DWUFAZOWA
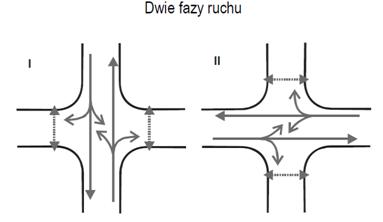
Najprostsza i jeszcze do niedawna stosowana bardzo często, posiadająca duże zalety jeśli chodzi straty czasu i przepustowość. Natomiast pod względem bezpieczeństwa już nie ze względu na wypadkowość spowodowaną przez relacje skrętne. Program sygnalizacji podzielony jest na dwie fazy np. tak jak na rysunku poniżej.
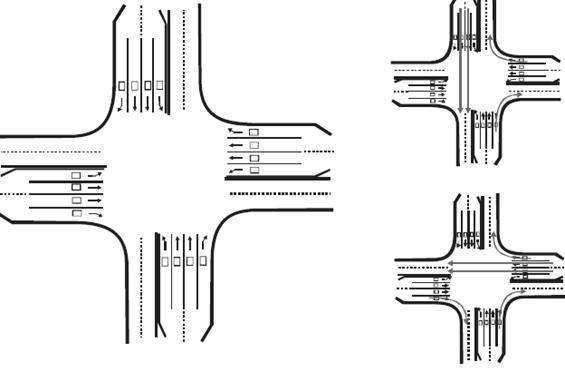
Rys 7. Przykład podziału sygnalizacji na dwie fazy na skrzyżowaniu czterowlotowym
- SYGNALIZACJA DWUFAZOWA Z PODFAZĄ
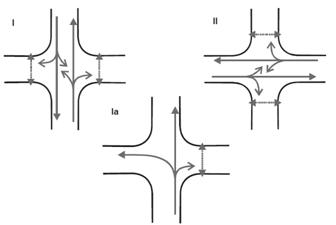
Przy dużym natężeniu pojazdów relacji skrętnej w lewo na jednym z wlotów danego kierunku można lekko usprawnić program poprzez wcześniejsze otwarcie wlotu bądź wcześniejsze zamknięcie przeciwnego. Ze względów bezpieczeństwa i przepustowości bardziej korzystne jest drugie rozwiązanie ponieważ chronimy przed dojściem do sytuacji kiedy kierujący z przeciwnego wlotu sugerują się ruchem pojazdów z przeciwka, ruszają nie patrząc na obowiązujący ich sygnał.
Rys 8. Przykład podziału sygnalizacji na dwie fazy z pod fazą na skrzyżowaniu czterowlotowym
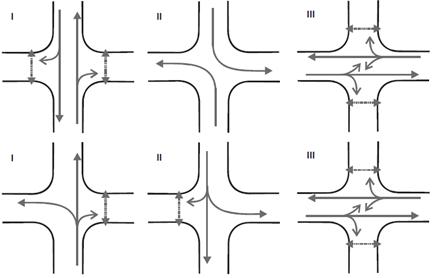
- SYGNALIZACJA TRÓJFAZOWA
W momencie kiedy występuje większa liczba pojazdów skręcających w lewo z dwóch przeciwległych zwrotów aby ułatwić im przejazd stosujemy powyższą sygnalizację. Gdzie jedna z faz zostaje rozbita na dwie tym samym umożliwia to bezkolizyjny przejazd lub gdy występują wydzielone pasy dla lewoskrętów i tworzymy oddzielną fazę dla nich.
Rys 9. Przykład podziału sygnalizacji na trzy fazy na skrzyżowaniu czterowlotowym
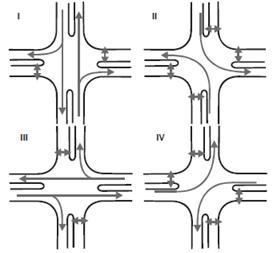
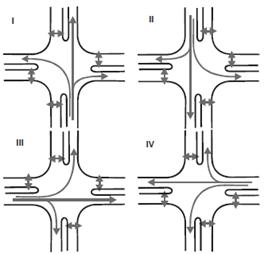
- SYGNALIZACJA WIELOFAZOWA
Aby łatwiej sterować większymi i bardziej skomplikowanymi skrzyżowaniami o zróżnicowanym natężeniu stosujemy większą ilość faz dzięki czemu otrzymujemy sygnalizację wielofazową . Wtedy musimy się dobrze zastanowić nad wyborem liczby, kolejności i konfiguracji faz. Jeśli chodzi strukturę to możemy się kierować bezkolizyjnością bądź mieszanką faz kolizyjnych z bezkolizyjnymi na podstawie analizy geometrii skrzyżowania i natężenia ruchu. Natomiast sekwencja faz powinna nam zapewnić jak najmniejszy czas tracony przy zachowaniu jak największego stopnia bezpieczeństwa.
Przykłady sygnalizacji czterofazowej
Rys 10 Wydzielone lewoskręty Rys 11. Sterowanie wlotami
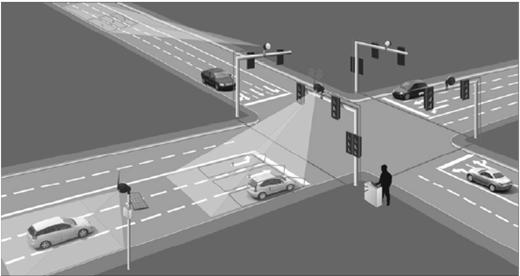
- SYGNALIZACJA ACYKLICZNA
Stosowana jest w przypadku odosobnionych skrzyżowań charakteryzujących się dużą zmiennością natężenia i struktury kierunkowej. Sygnalizacja acykliczna posiada zmienną sekwencję faz zależną od potrzeb ruchu oraz uwzględniającą priorytetową obsługę wybranych użytkowników ruchu. Aby funkcjonowała ona poprawnie informację o sytuacji ruchowej przesyłane są do sterownika za pomocą układów detekcyjnych, które kontrolują wszystkie strumienie ruchu włączając w to pieszych i rowerzystów. Jako takiego cyklu w tej sygnalizacji nie ma, ponieważ fazy tworzone są na bieżąco w zależności od zgłoszeń a czas ich trwania od charakteru ruchu. Może ona odbywać się poprzez sterowanie:
– fazami, które są tu parametrem i dotyczą one wszystkich relacjach mających prawo ruchu na danym skrzyżowaniu. Polega ono na tym, że sterownik rejestruje zgłoszenie na sygnał zielony i podejmuje decyzję dotyczącą doboru długości światła zielonego i operowaniem fazami dowolnie w zależności od zapotrzebowania.
Rys 12. Przykład sterowania fazami
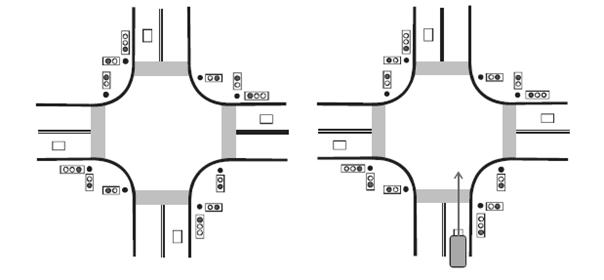
Rys 13. Detekcja pojazdów
– grupami sygnalizacyjnymi, które są teraz parametrem a nie poszczególne fazy. Dzięki czemu możemy uwzględnić preferencje wybranych użytkowników takich jak pojazdy komunikacji miejskiej. Tym samym otrzymujemy dynamiczne tworzenie faz a także maksymalizację nakładek zielonego dla wybranych grup sygnalizacyjnych. Sygnał zielony występuje wtedy w ściśle określonym czasie i długości dla całej grupy bez konieczności założenia długości trwania poszczególnych faz.
Rys 14. Przykład sterowania grupami
Należy zwrócić uwagę, że podstawą sygnalizacji acyklicznej są stan ustalony polegający na nadawaniu na każdym sygnalizatorze danego sygnału stałego lub przerywanego podczas gdy nie ma żadnych zgłoszeń. Natomiast gdy pojawi się jakieś zgłoszenie sygnalizacja przechodzi w stan wzbudzenia czyli realizuje zapotrzebowanie otrzymane przez detektor.
Strategie sterowania dla stanu ustalonego:
- All Red czyli wszystkie światła czerwone aż do momentu pojawienia się zgłoszenia i zmiana na zielone dla poszczególnej fazy.
- Obsługa wybranej fazy tym samym całej grupy sygnalizacyjnej, dla których wystąpienie zgłoszenia w tym samym momencie posiada największe prawdopodobieństwo.
- Obsługa ostatniej fazy czyli skojarzenie fazy z fazą ostatnio wykonywaną.
- Praca Cykliczna tzn., że posiadamy pewną strukturę programową przy założeniu nadawania minimalnych świateł zielonych wraz z obsługą wszystkich użytkowników ruchu. Dzięki temu otrzymujemy obsługę w razie braku dobrej identyfikacji zgłoszenia przez detektor.
Najczęstszym i najprostszym przykładem sygnalizacji acyklicznej jest SYGNALIZACJA WZBUDZANA polegająca na tym, że podczas stanu ustalonego nadawane jest światło zielone dla pojazdów, po czym otrzymują oni światło czerwone w stanie wzbudzonym a inna relacja kolizyjna otrzymuje sygnał zielony piesi lub tramwaj. Do przejścia ze stanu pierwszego do drugiego dochodzi poprzez np. detekcję lub naciśnięcie przycisku.
- SYGNALIZACJA AKOMODACYJNA
Sygnalizacja ta charakteryzuje się zmianą liczby i długości faz w zależności od zapotrzebowania rejestrowanych na podstawie zgłoszeń z detektorów przekazywane sterownikom. Zaletami jej jest dostosowywanie się samoczynnie do nagłych i krótkotrwałych wahań ruchu, dzięki czemu zwiększamy wtedy efektywność, wykorzystanie jej jest możliwe również przy małych natężeniach ruchu, Wadą są koszta urządzeń i eksploatacja.
Wyróżniamy dwa typy detektorów ze względu na sposób reagowania:
- detektor obecności – wykrywa obecność pojazdu w strefie i dokonuje pomiaru oczekiwania
- detektor przejazdu – reaguje na przejazd całego pojazdu jak i poszczególnej osi w strefie wykrywania
Możemy je podzielić również ze względu na:
- Typ urządzenia:
- pneumatyczne,
- linkowe,
- indukcyjne (najbardziej popularne w Polsce),
- radarowe (Dopplerowskie),
- na podczerwień,
- video,
- dotykowe (na przycisk, „sanki”).
- Rodzaj użytkownika:
- dla pojazdów w ruchu ogólnym,
- dla pojazdów specjalnych na wspólnym pasie jak i na wydzielonym,
- dla pieszych / rowerzystów.
Bibliografia:
1. Rozporządzenie Ministra Transportu i Gospodarki Morskiej oraz Spraw Wewnętrznych i Administracji z dnia 21 czerwca 1999 r. w sprawie znaków i sygnałów drogowych. Dz.U. Nr 58 z dnia 26 czerwca 1999 r. poz. 622. – Załącznika 3 – Szczegółowe warunki techniczne dla sygnałów drogowych i warunki ich umieszczania na drogach.
 Oznakowanie pionowe
Oznakowanie pionowe Znaki zakazu
Znaki zakazu Znaki nakazu
Znaki nakazu Znaki informacyjne
Znaki informacyjne Znaki kierunku
Znaki kierunku Znaki uzupełniające
Znaki uzupełniające Tabliczki
Tabliczki Znaki dodatkowe
Znaki dodatkowe Znaki poziome
Znaki poziome Linie krawędziowe
Linie krawędziowe Strzałki
Strzałki Znaki poprzeczne
Znaki poprzeczne Znaki uzupełniające
Znaki uzupełniające Elementy odblaskowe
Elementy odblaskowe Liternictwo
Liternictwo Urządzenia BRD
Urządzenia BRD Obiekty w skrajni drogi
Obiekty w skrajni drogi Ruch pieszych i rowerzystów
Ruch pieszych i rowerzystów Zamykanie drogi dla ruchu
Zamykanie drogi dla ruchu Aktywne urządzenia BRD
Aktywne urządzenia BRD Ograniczanie prędkości
Ograniczanie prędkości Lustra i osłony
Lustra i osłony Prace w pasie drogowym
Prace w pasie drogowym Sygnalizatory wiatru
Sygnalizatory wiatru Sygnalizacja świetlna
Sygnalizacja świetlna Program sygnalizacji
Program sygnalizacji